Во многих электронных схемах используются системы активного охлаждения с вентиляторами. Чаще всего их моторы управляются микроконтроллером или другой специализированной микросхемой, а скорость вращения регулируется с помощью ШИМ. Такое решение характеризуется не слишком хорошей плавностью работы, может привести к нестабильной работе вентилятора, а кроме того, создает много помех.
Для потребностей высококачественной аудиотехники разработан аналоговый регулятор оборотов вентилятора. Схема пригодится при строительстве усилителей НЧ с активной системой охлаждения и позволяет выполнить плавную регулировку оборотов вентиляторов в зависимости от температуры. Производительность и мощность зависит в основном от выходного транзистора, тесты проводились с выходными токами до 2 А, что позволяет подключить даже несколько больших вентиляторов на 12 В. Естественно можно применить это устройство и для управления обычными моторами постоянного тока, при необходимости повысив питающее напряжение. Хотя для совсем уже мощных двигателей придётся задействовать системы плавного пуска tehprivod.su/katalog/ustroystva-plavnogo-puska
Принципиальная схема регулятора оборотов мотора
Схема состоит из двух частей: дифференциального усилителя и стабилизатора напряжения. Первая часть занимается измерением температуры и обеспечивает напряжение, пропорциональное температуре, когда она превышает установленный порог. Это напряжение является управляющим для стабилизатора напряжения, выход которого контролирует питание вентиляторов.
Схема регулятора оборотов электродвигателя постоянного тока приведена на рисунке. Основа - компаратор U2 (LM393), работающий в этой конфигурации как обычный операционный усилитель. Первая его часть U2A работает как усилитель дифференциальный, чьи условия работы определяют резисторы R4-R5 (47k) и R6-R7 (220k). Конденсатор C10 (22pF) улучшает стабильность усилителя, а R12 (10k) подтягивает выход компаратора к плюсу питания.

На один из входов дифференциального усилителя подается напряжение, которое образуется через делитель, состоящий из R2 (6,8k), R3 (680 Ом) и PR1 (500 Ом), и фильтруется с помощью C4 (100nF). На второй вход этого усилителя поступает напряжение с датчика температуры, который в данном случае один из разъемов транзистора T1 (BD139), поляризованный небольшим током с помощью R1 (6,8k).
Конденсатор C2 (100nF) был добавлен, чтобы фильтровать напряжение с датчика температуры. Полярность датчика и делителя опорного напряжения задает стабилизатор U1 (78L05) вместе с конденсаторами C1 (1000uF/16V), C3 (100nF) и C5 (47uF/25V), предоставляя стабилизированное напряжение 5 В.
Компаратор U2B работает как классический усилитель ошибки. Он сравнивает напряжение с выхода дифференциального усилителя с выходным напряжением с помощью цепочки R10 (3,3k), R11 (47 Ом) и PR2 (200 Ом). Исполнительным элементом стабилизатора является транзистор T2 (IRF5305), база которого управляется делителем R8 (10k) и R9 (5,1k).
Конденсатор C6 (1uF) и C7 (22pF) и C9 (10nF) улучшают стабильность петли обратной связи. Конденсатор C8 (1000uF/16V) фильтрует выходное напряжение, он имеет значительное влияние на стабильность системы. Разъемом выхода - AR2 (TB2), а разъем питания - AR1 (TB2).

Благодаря применению выходного транзистора с низким сопротивлением в открытом состоянии, схема обладает очень малым падением напряжения - порядка 50 мВ при выходном токе 1 А, что не требует блока питания с более высоким напряжением для управления вентиляторами, работающие на 12 В.

В большинстве случаев в роли U2 можно применить популярный операционный усилитель LM358, правда несколько ухудшив выходные параметры.
Сборка регулятора
Монтаж следует начинать с установки двух перемычек, затем должны быть установлены все резисторы и мелкие керамические конденсаторы.


В большинстве случаев оба эти элемента будут установлены снизу платы на ножках, изогнутых под углом 90 градусов. Такая укладка позволит их прикрутить непосредственно к радиатору (обязательно использовать изоляционные прокладки).
Обсудить статью РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ 12 В
Потребовалось мне сделать регулятор скорости для пропеллера. Чтобы дым от паяльника сдувать, да морду лица вентилировать. Ну и, для прикола, уложить все в минимальную стоимость. Проще всего маломощный двигатель постоянного тока, конечно, регулировать переменным резистором, но найти резюк на такой малый номинал, да еще нужной мощности это надо сильно постараться, да и стоить он будет явно не десять рублей. Поэтому наш выбор ШИМ + MOSFET.
Ключ я взял IRF630
. Почему именно этот MOSFET
? Да просто у меня их откуда то завелось штук десять. Вот и применяю, так то можно поставить что либо менее габаритное и маломощное. Т.к. ток тут вряд ли будет больше ампера, а IRF630
способен протащить через себя под 9А. Зато можно будет сделать целый каскад из вентиляторов, подсоединив их к одной крутилке — мощи хватит:)
Теперь пришло время подумать о том, чем мы будем делать ШИМ
. Сразу напрашивается мысль — микроконтроллером. Взять какой-нибудь Tiny12 и сделать на нем. Мысль я эту отбросил мгновенно.
- Тратить такую ценную и дорогую деталь на какой то вентилятор мне западло. Я для микроконтроллера поинтересней задачу найду
- Еще софт под это писать, вдвойне западло.
- Напряжение питания там 12 вольт, понижать его для питания МК до 5 вольт это вообще уже лениво
- IRF630 не откроется от 5 вольт, поэтому тут пришлось бы еще и транзистор ставить, чтобы он подавал высокий потенциал на затвор полевика. Нафиг нафиг.
Операционные усилители можно отбросить сразу. Дело в том, что у ОУ общего назначения уже после 8-10кГц, как правило, предельное выходное напряжение
начинает резко заваливаться, а нам надо полевик дрыгать. Да еще на сверхзвуковой частоте, чтобы не пищало.
ОУ лишенные такого недостатка стоят столько, что на эти деньги можно с десяток крутейших микроконтроллеров купить. В топку!
Остаются компараторы, они не обладают способностью операционника плавно менять выходное напряжение, могут только сравнивать две напруги и замыкать выходной транзистор по итогам сравнения, но зато делают это быстро и без завала характеристики. Пошарил по сусекам и компараторов не нашел. Засада! Точнее был LM339 , но он был в большом корпусе, а впаивать микросхему больше чем на 8 ног на такую простую задачу мне религия не позволяет. В лабаз тащиться тоже было влом. Что делать?
И тут я вспомнил про такую замечательную вещь как аналоговый таймер — NE555
. Представляет собой своеобразный генератор, где можно комбинацией резисторов и конденсатором задавать частоту, а также длительность импульса и паузы. Сколько на этом таймере разной хрени сделали, за его более чем тридцатилетнюю историю… До сих пор эта микросхема, несмотря на почтенный возраст, штампуется миллионными тиражами и есть практически в каждом лабазе по цене в считанные рубли. У нас, например, он стоит около 5 рублей. Порылся по сусекам и нашел пару штук. О! Щас и замутим.
 |
Как это работает
Если не вникать глубоко в структуру таймера 555, то несложно. Грубо говоря, таймер следит за напряжением на конденсаторе С1, которое снимает с вывода THR
(THRESHOLD — порог). Как только оно достигнет максимума (кондер заряжен), так открывается внутренний транзистор. Который замыкает вывод DIS
(DISCHARGE — разряд) на землю. При этом на выходе OUT
появляется логический ноль. Конденсатор начинает разряжаться через DIS
и когда напряжение на нем станет равно нулю (полный разряд) система перекинется в противоположное состояние — на выходе 1, транзистор закрыт. Конденсатор начинает снова заряжаться и все повторяется вновь.
Заряд конденсатора С1 идет по пути: «R4->верхнее плечо R1 ->D2
«, а разряд по пути: D1 -> нижнее плечо R1 -> DIS
. Когда мы крутим переменный резистор R1 то у нас меняются соотношения сопротивлений верхнего и нижнего плеча. Что, соответственно, меняет отношение длины импульса к паузе.
Частота задается в основном конденсатором С1 и еще немного зависит от величины сопротивления R1.
Резистор R3 обеспечивает подтяжку выхода к высокому уровню — так так там выход с открытым коллектором. Который не способен самостоятельно выставить высокий уровень.
Диоды можно ставить любые совершенно, кондеры примерно такого номинала, отклонения в пределах одного порядка не влияют особо на качество работы. На 4.7нанофарадах, поставленных в С1, например, частота снижается до 18кГц, но ее почти не слышно, видать слух у меня уже не идеальный:(
Покопался в закромах, которая сама расчитывает параметры работы таймера NE555 и собрал схему оттуда, для астабильного режима со коэффициентом заполнения меньше 50%, да вкрутил там вместо R1 и R2 переменный резистор, которым у меня менялась скважность выходного сигнала. Надо только обратить внимание на то, что выход DIS (DISCHARGE) через внутренний ключ таймера подключен на землю, поэтому нельзя было его сажать напрямую к потенциометру , т.к. при закручивании регулятора в крайнее положение этот вывод бы сажался на Vcc. А когда транзистор откроется, то будет натуральное КЗ и таймер с красивым пшиком испустит волшебный дым, на котором, как известно, работает вся электроника. Как только дым покидает микросхему — она перестает работать. Вот так то. Посему берем и добавляем еще один резистор на один килоом. Погоды в регулировании он не сделает, а от перегорания защитит.
Сказано — сделано. Вытравил плату, впаял компоненты:
Снизу все просто.
Вот и печатку прилагаю, в родимом Sprint Layout —
А это напряжение на движке. Видно небольшой переходный процесс. Надо кондерчик поставить в параллель на пол микрофарады и его сгладит.
Как видно, частота плывет — оно и понятно, у нас ведь частота работы зависит от резисторов и конденсатора, а раз они меняются, то и частота уплывает, но это не беда. Во всем диапазоне регулирования она ни разу не влазит в слышимый диапазон. А вся конструкция обошлась в 35 рублей, не считая корпуса. Так что — Profit!
Наиболее простой метод регулирования скорости вращения двигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM). Суть этого метода заключается в том, что напряжение питания подается на двигатель в виде импульсов. При этом частота следования импульсов остается постоянной, а их длительность может меняться.
ШИМ сигнал характеризуется таким параметром как коэффициент заполнения или Duty cycle. Это величина обратная скважности и равна отношению длительности импульса к его периоду.
D = (t/T) * 100%
На рисунках ниже изображены ШИМ сигналы с различными коэффициентами заполнения.
При таком методе управления скорость вращения двигателя будет пропорциональна коэффициенту заполнения ШИМ сигнала.
Простая схема управления двигателем постоянного тока
Простейшая схема управления двигателем постоянного тока состоит из полевого транзистора, на затвор которого подается ШИМ сигнал. Транзистор в данной схеме выполняет роль электронного ключа, коммутирующего один из выводов двигателя на землю. Транзистор открывается на момент длительности импульса.

Как будет вести себя двигатель в таком включении? Если частота ШИМ сигнала будет низкой (единицы Гц), то двигатель будет поворачиваться рывками. Это будет особенно заметно при маленьком коэффициенте заполнения ШИМ сигнала.
При частоте в сотни Гц мотор будет вращаться непрерывно и его скорость вращения будет изменяться пропорционально коэффициенту заполнения. Грубо говоря, двигатель будет "воспринимать" среднее значение подводимой к нему энергии.
Схема для генерации ШИМ сигнала
Существует много схем для генерации ШИМ сигнала. Одна из самых простых - это схема на основе 555-го таймера. Она требует минимум компонентов, не нуждается в настройке и собирается за один час.

Напряжение питания схемы VCC может быть в диапазоне 5 - 16 Вольт. В качестве диодов VD1 - VD3 можно взять практически любые диоды.
Если интересно разобраться, как работает эта схема, нужно обратиться к блок схеме 555-го таймера. Таймер состоит из делителя напряжения, двух компараторов, триггера, ключа с открытым коллектором и выходного буфера.

Вывод питания (VCC) и сброса (Reset) у нас заведены на плюс питания, допустим, +5 В, а земляной (GND) на минус. Открытый коллектор транзистора (вывод DISCH) подтянут к плюсу питания через резистор и с него снимается ШИМ сигнал. Вывод CONT не используется, к нему подключен конденсатор. Выводы компараторов THRES и TRIG объединены и подключены к RC цепочке, состоящей из переменного резистора, двух диодов и конденсатора. Средний вывод переменного резистора подключен к выводу OUT. Крайние выводы резистора подключены через диоды к конденсатору, который вторым выводом подключен к земле. Благодаря такому включению диодов, конденсатор заряжается через одну часть переменного резистора, а разряжается через другую.
В момент включения питания на выводе OUT низкий логический уровень, тогда на выводах THRES и TRIG, благодаря диоду VD2, тоже будет низкий уровень. Верхний компаратор переключит выход в ноль, а нижний в единицу. На выходе триггера установится нулевой уровень (потому что у него инвертор на выходе), транзисторный ключ закроется, а на выводе OUT установиться высокий уровень (потому что у него на инвертор на входе). Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Приблизительную частоту ШИМ сигнала, формируемого этой схемой, можно рассчитать по следующей формуле:
F = 1.44/(R1*C1), [Гц]
где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 288 Гц.
ШИМ регулятор оборотов двигателя постоянного тока
Объединим две представленные выше схемы, и мы получим простую схему регулятора оборотов двигателя постоянного тока, которую можно применить для управления оборотами двигателя игрушки, робота, микродрели и т.д.
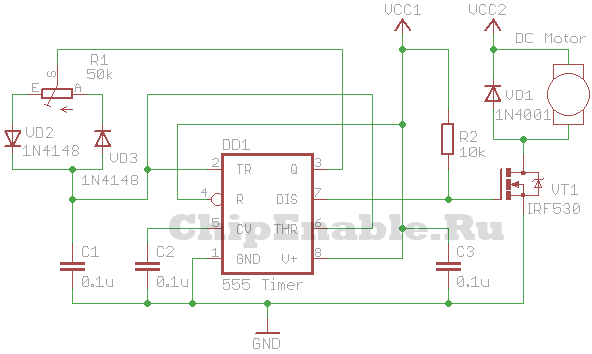
VT1 - полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1.
Вместо полевого транзистора можно использовать биполярный n-p-n транзистор, транзистор дарлингтона, оптореле соответствующей мощности.
В любом современном электроинструменте или бытовом приборе используется коллекторный двигатель. Это связано с их универсальностью, т. е. способностью работать как от переменного, так и от постоянного напряжения. Ещё одно преимущество заключается эффективном пусковом моменте.
Однако высокая частота оборотов коллекторного двигателя устраивает далеко не всех пользователей. Для плавности пуска и возможности менять частоту вращений был изобретён регулятор , который вполне возможно изготовить своими руками.
Принцип работы и разновидности коллекторных двигателей
Каждый электродвигатель состоит из коллектора, статора, ротора и щёток. Принцип его работы довольно прост:
Помимо стандартного устройства также существуют:

Устройство регулятора
В мире существует множество схем таких устройств. Тем не менее всех их можно разделить на 2 группы: стандартные и модифицированные изделия.
Стандартное устройство
Типичные изделия отличаются простотой в изготовлении идинистора, хорошей надёжностью при изменении оборотов двигателя. Как правило, такие модели основываются на тиристорных регуляторах. Принцип работы подобных схем достаточно прост:

Таким образом, происходит регулировка оборотов коллекторного двигателя. В большинстве случаев подобную схему используют в зарубежных бытовых пылесосах. Однако следует знать, что такой регулятор оборотов не обладает обратной связью. Поэтому при изменении нагрузки придётся настраивать обороты электродвигателя.
Изменённые схемы
 Конечно, стандартное устройство устраивает многих любителей регуляторов оборотов «покопаться» в электронике. Однако, без прогресса и улучшения изделий мы бы до сих пор жили в каменном веке. Поэтому постоянно изобретаются более интересные схемы, которые с удовольствием применяют многие производители.
Конечно, стандартное устройство устраивает многих любителей регуляторов оборотов «покопаться» в электронике. Однако, без прогресса и улучшения изделий мы бы до сих пор жили в каменном веке. Поэтому постоянно изобретаются более интересные схемы, которые с удовольствием применяют многие производители.
Чаще всего используются реостатные и интегральные регуляторы. Как понятно из названия, первый вариант основан на реостатной схеме. Во втором же случае применяется интегральный таймер.
Реостатные отличаются эффективностью в смене количества оборотов коллекторного двигателя. Высокая эффективность обусловлена силовыми транзисторами, которые забирают часть напряжения. Таким образом, снижается поступление тока и двигатель работает с меньшим усердием.
Видео: устройство регулятора оборотов с поддержанием мощности
Главный недостаток такой схемы заключается в большом объёме выделяемого тепла. Поэтому для бесперебойной работы, регулятор должен постоянно охлаждаться. Притом охлаждение устройства должно быть интенсивным.
 Иной подход реализован в интегральном регуляторе, где за нагрузку отвечает интегральный таймер. Как правило, в подобных схемах используются транзисторы практически любых наименований. Это связано с тем, что в составе имеется микросхема, обладающая большими значениями выходного тока.
Иной подход реализован в интегральном регуляторе, где за нагрузку отвечает интегральный таймер. Как правило, в подобных схемах используются транзисторы практически любых наименований. Это связано с тем, что в составе имеется микросхема, обладающая большими значениями выходного тока.
Если нагрузка меньше 0,1 ампера, то всё напряжение поступает прямо на микросхему в обход транзисторов. Однако для эффективной работы регулятора необходимо, чтобы на затворе было напряжение 12В. Поэтому электроцепь и напряжение самого питания должно соответствовать этому диапазону.
Обзор типичных схем
 Регулировать вращения вала электродвигателя малой мощности можно посредством последовательного соединения резистора питания с отсутствие. Однако у такого варианта имеется очень низкий КПД и отсутствие возможности плавного изменения скорости. Чтобы избежать такой неприятности, следует рассмотреть несколько схем регулятора, которые применяются чаще всего.
Регулировать вращения вала электродвигателя малой мощности можно посредством последовательного соединения резистора питания с отсутствие. Однако у такого варианта имеется очень низкий КПД и отсутствие возможности плавного изменения скорости. Чтобы избежать такой неприятности, следует рассмотреть несколько схем регулятора, которые применяются чаще всего.
Как известно, ШИМ имеет постоянную амплитуду импульсов. Кроме того, амплитуда идентична напряжению питания. Следовательно, электродвигатель не остановится, даже работая на малых оборотах.
Второй вариант аналогичен первому. Единственное отличие, что в качестве задающего генератора используется операционный усилитель. Этот компонент имеет частоту 500 Гц и занимается выработкой импульсов, имеющих треугольную форму. Регулировка также осуществляется переменным резистором.
Как сделать своими руками
 Если нет желания тратиться на приобретение готового устройства, его можно изготовить самостоятельно. Таким образом, можно не только сэкономить деньги, но и получить полезный опыт. Итак, для изготовления тиристорного регулятора потребуется:
Если нет желания тратиться на приобретение готового устройства, его можно изготовить самостоятельно. Таким образом, можно не только сэкономить деньги, но и получить полезный опыт. Итак, для изготовления тиристорного регулятора потребуется:
- паяльник (для проверки работоспособности);
- провода;
- тиристор, конденсаторы и резисторы;
- схема.
Как видно по схеме, регулятором контролируется только 1 полупериод. Однако для тестирования работоспособности на обычном паяльнике этого будет вполне достаточно.
Если знаний по расшифровке схемы недостаточно, можно ознакомиться с текстовым вариантом:

Использование регуляторов позволяет более экономично использовать электродвигатели. В определённых ситуациях такое устройство можно изготовить самостоятельно. Однако для более серьёзных целей (например, контроля оборудования для отопления) лучше приобрести готовую модель. Благо, на рынке есть широкий выбор таких изделий, а цена вполне демократичная.
При использовании электродвигателя в различных устройствах и инструментах неизменно возникает необходимость регулировки скорости вращения вала.
Самостоятельно сделать регулятор оборотов электродвигателя не составит труда. Нужно лишь подыскать качественную схему, устройство которой полностью бы подходило к особенностям и типу конкретного электрического двигателя.
Использование частотных преобразователей
Для регулировки оборотов электрического двигателя, работающего от сети с напряжением в 220 и 380 Вольт, могут использоваться частотные преобразователи. Высокотехнологичные электронные устройства позволяют благодаря изменению частоты и амплитуды сигнала плавно регулировать частоту вращения электродвигателя.
В основе таких преобразователей лежат мощные полупроводниковые транзисторы с широкоимпульсными модуляторами.
Преобразователи с помощью соответствующего блока управления на микроконтроллере позволяют плавно изменять показатель оборотов двигателя.
Высокотехнологичные преобразователи частоты используются в сложных и нагруженных механизмах. Современные частотные регуляторы имеют сразу несколько степеней защиты , в том числе по нагрузке, показателю тока напряжения и другим характеристикам. Отдельные модели питаются от электросети с однофазным напряжением в 220 Вольт и могут переделывать напряжение в трехфазные 380 Вольт. Использование таких преобразователей позволяет в домашних условиях использовать асинхронные электрические двигатели без применения сложных схем подключения.
Применение электронных регуляторов
Использование мощных асинхронных двигателей невозможно без применения соответствующих регуляторов оборотов. Такие преобразователи используются для следующих целей:

Используемая частотными преобразователями схема работы аналогична у большинства бытовых приборов. Похожие устройства также используются в сварочных аппаратах, ИБП, питании ПК и ноутбуков, стабилизаторах напряжения, блоках розжига ламп, а также в мониторах и жидкокристаллических телевизорах.
Несмотря на кажущуюся сложность схемы, сделать регулятор оборотов электродвигателя 220 В будет достаточно просто.
Принцип работы устройства
Принцип работы и конструкция регулятора оборотов двигателя отличается простотой, поэтому, изучив технические моменты, вполне по силам выполнить их самостоятельно. Конструктивно выделяют несколько основных компонентов, из которых состоят регуляторы вращения:

Отличием асинхронных двигателей от стандартных приводов является вращение ротора с максимальными показателями мощности при подаче напряжения на обмотку трансформатора. На начальном этапе показатели потребляемого тока и мощность у двигателя возрастает до максимума, что приводит к существенной нагрузке на привод и его быстрому выходу из строя.
При запуске двигателя на максимальных оборотах выделяется большое количество тепла, что приводит к перегреву привода, обмотки и других элементов привода. Благодаря использованию частотного преобразователя имеется возможность плавно разгонять двигатель, что предупреждает перегрев и другие проблемы с агрегатом. Электромотор может при использовании частотного преобразователя запускаться на частоте оборотов 1000 в минуту, а в последующем обеспечивается плавный разгон, когда каждые 10 секунд прибавляется 100−200 оборотов двигателя.
Изготовление самодельных реле
 Изготовить самодельный регулятор оборотов электродвигателя 12 В не составит какого-либо труда. Для такой работы потребуется следующее:
Изготовить самодельный регулятор оборотов электродвигателя 12 В не составит какого-либо труда. Для такой работы потребуется следующее:
- Проволочные резисторы.
- Переключатель на несколько положений.
- Блок управления и реле.
Использование проволочных резисторов позволяет изменять напряжение питания, соответственно, и частоту вращения двигателя. Такой регулятор обеспечивает ступенчатый разгон двигателя, отличается простой конструкции и может быть выполнен даже начинающими радиолюбителями. Такие простейшие самодельные ступенчатые регуляторы можно использовать с асинхронными и контактными двигателями.
Принцип работы самодельного преобразователя:

 В прошлом наибольшей популярностью пользовались механические регуляторы, выполненные на основе вариатора или шестеренчатого привода. Однако они не отличались должной надежностью и часто выходили из строя.
В прошлом наибольшей популярностью пользовались механические регуляторы, выполненные на основе вариатора или шестеренчатого привода. Однако они не отличались должной надежностью и часто выходили из строя.
Самодельные электронные регуляторы зарекомендовали себя с наилучшей стороны. Они используют принцип изменения ступенчатого или плавного напряжения, отличаются долговечностью, надежностью, имеют компактные габариты и обеспечивают возможность тонкой настройки работы привода.
Дополнительное использование в схемах электронных регуляторов симисторов и аналогичных устройств позволяет обеспечить плавное изменение мощности напряжения, соответственно электродвигатель будет правильно набирать обороты, постепенно выходя на свою максимальную мощность.
Для обеспечения качественной регулировки в схему включаются переменные резисторы, которые изменяют амплитуду входящего сигнала, обеспечивая плавное или ступенчатое изменение числа оборотов.
Схема на ШИМ-транзисторе
Регулировать скорость вращения вала у маломощных электродвигателей можно при помощи шин-транзистора и последовательного соединения резисторов в питании. Этот вариант отличается простотой реализации, однако имеет низкий КПД и не позволяет плавно изменять скорость вращения двигателя. Изготовить своими руками регулятор оборотов коллекторного двигателя 220 В с использованием шим-транзистора не составит особой сложности.
Принцип работы регулятора на транзисторе:
- Используемые сегодня шин-транзисторы имеют генератор пилообразного напряжения частотой в 150 Герц.
- Операционные усилители используются в роли компаратора.
- Изменение скорости вращения осуществляется за счёт наличия переменного резистора, управляющего длительностью импульсов.
Транзисторы имеют ровную постоянную амплитуду импульсов, идентичную амплитуде напряжения питания. Это позволяет выполнять регулировку оборотов двигателя 220 В и поддерживать работу агрегата даже при подаче минимального напряжения на обмотку трансформатора.
Благодаря возможности подключения микроконтроллера к ШИМ-транзистору обеспечивается возможность автоматической настройки и регулировки работы электропривода. Такие схемы исполнения преобразователей могут иметь дополнительные компоненты, которые расширяют функциональные возможности привода, обеспечивая работу в полностью автоматическом режиме.
Внедрение автоматических систем управления
Наличие в регуляторах и частотных преобразователях микроконтроллерного управления позволяет улучшить параметры работы привода, а сам мотор может работать в полностью автоматическом режиме, когда используемый контроллер плавно или ступенчато изменяет показатели частоты вращения агрегата. Сегодня в качестве микроконтроллерного управления используются процессоры, которые имеют отличающееся число выходов и входов. К такому микроконтроллеру можно подключить различные электронные ключи, кнопки, всевозможные датчики потери сигнала и так далее.
 В продаже можно найти различные типы микроконтроллеров
, которые отличаются простотой в использовании, гарантируют качественную настройку работы преобразователя и регулятора, а наличие дополнительных входов и выходов позволяет подключать к процессору различные дополнительные датчики, по сигналу которых устройство будет уменьшать или увеличивать число оборотов или же полностью прекращать подачу напряжения на обмотки электродвигателя.
В продаже можно найти различные типы микроконтроллеров
, которые отличаются простотой в использовании, гарантируют качественную настройку работы преобразователя и регулятора, а наличие дополнительных входов и выходов позволяет подключать к процессору различные дополнительные датчики, по сигналу которых устройство будет уменьшать или увеличивать число оборотов или же полностью прекращать подачу напряжения на обмотки электродвигателя.
Сегодня в продаже имеются различные преобразователи и регуляторы электродвигателя. Впрочем, при наличии даже минимальных навыков работы с радиодеталями и умении читать схемы можно выполнить такое простейшее устройство, которое будет плавно или ступенчато изменять обороты двигателя. Дополнительно можно включить в цепь управляющий симисторный реостат и резистор, что позволит плавно изменять обороты, а наличие микроконтроллерного управления полностью автоматизирует использование электрических двигателей.